ในวงการส่งกำลังเชิงกล คำว่า ‘gearbox’ และ ‘reducer’ มักถูกใช้อยู่บ่อยครั้ง แต่ทั้งสองมีนัยทางเทคนิคและการประยุกต์ใช้ที่แตกต่างกัน การเข้าใจความแตกต่างเหล่านี้จึงมีความสำคัญต่อการเลือกอุปกรณ์ให้ถูกต้องและการออกแบบระบบ
ความแตกต่างระหว่าง gearboxes (transmissions) และ reducer(เช่น worm reducer, planetary reducer) :
วัตถุประสงค์ - กล่องเกียร์ใช้เพื่อเพิ่มหรือลดความเร็วในการหมุนและแรงบิด ขึ้นอยู่กับความต้องการ อาจช่วยลดความเร็วเพื่อเพิ่มแรงบิด หรือเพิ่มความเร็วเพื่อลดแรงบิด ในยานยนต์ กล่องเกียร์สามารถลดความเร็วได้โดยการใช้อัตราทดเกียร์ต่ำเพื่อเพิ่มแรงบิดสำหรับการปีนเขา ในขณะที่เกียร์สูงจะช่วยเพิ่มความเร็วเพื่อยกระดับประสิทธิภาพการใช้เชื้อเพลิง
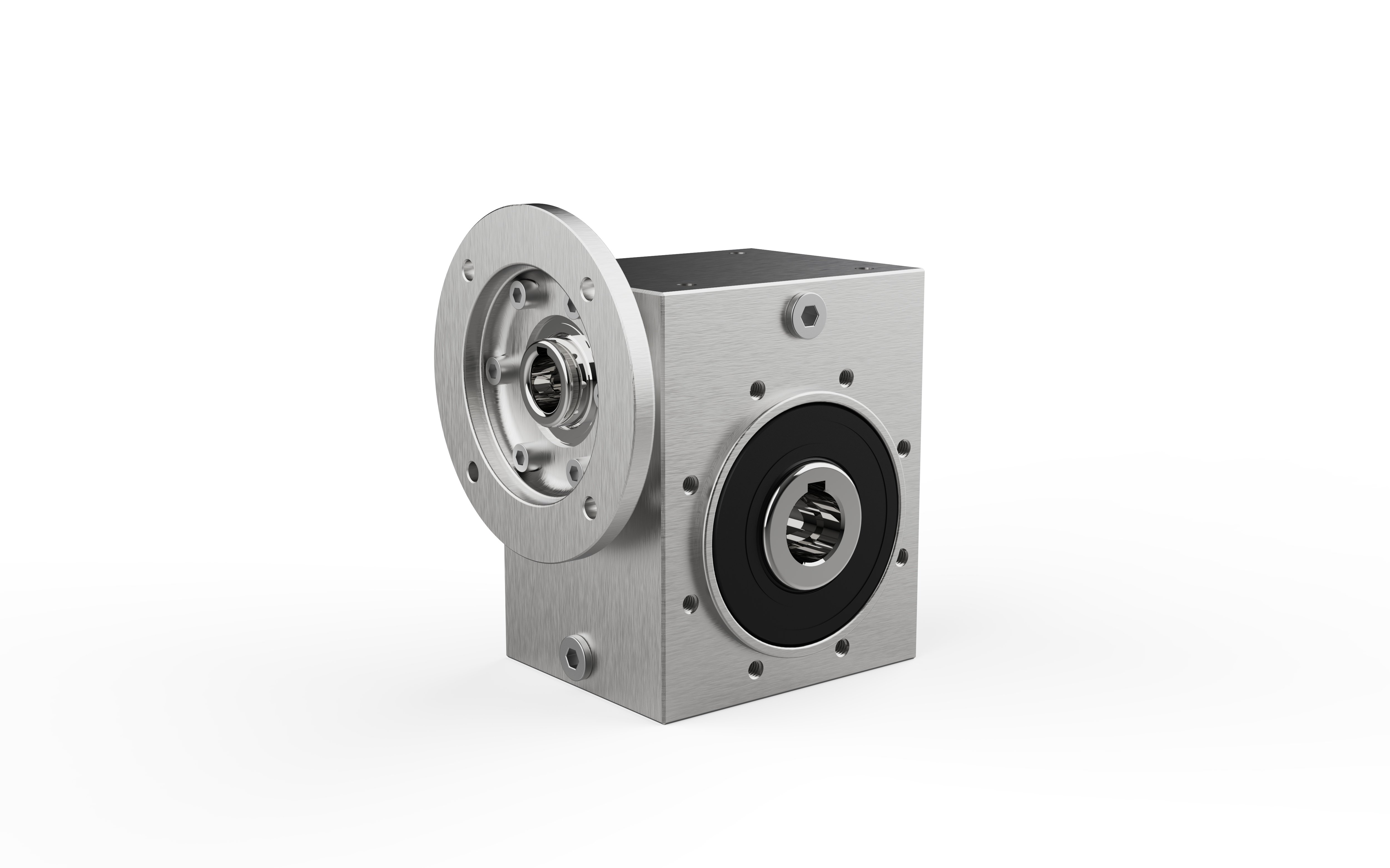
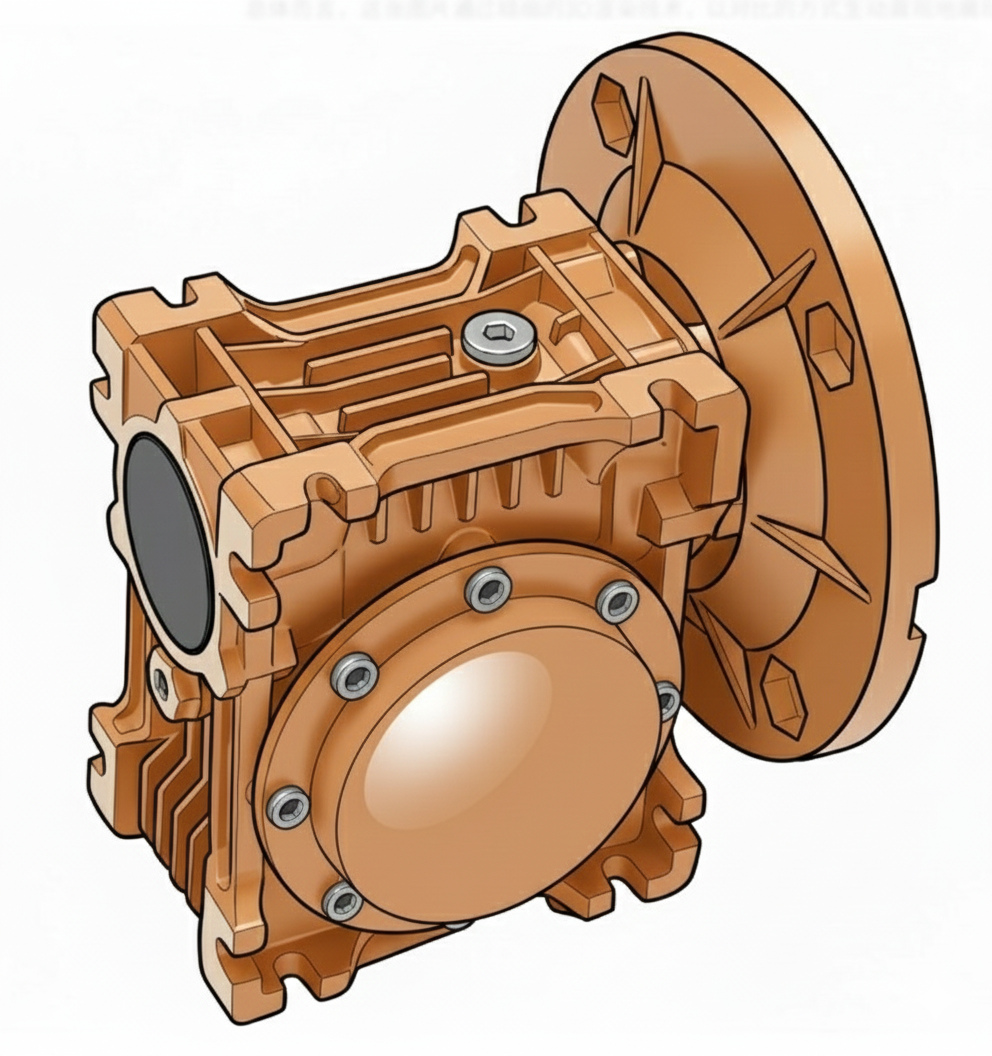
ตัวลดความเร็วถูกออกแบบมาโดยเฉพาะเพื่อลดความเร็วและเพิ่มแรงบิด โดยในเครื่องผสม ซึ่งความเร็วในการหมุนของมอเตอร์สูงเกินไปแต่มีแรงบิดต่ำ อาจต่อตัวลดแบบเกลียว WR เข้าด้วยกัน เพื่อแปลงความเร็วสูงของมอเตอร์ให้กลายเป็นความเร็วต่ำและแรงบิดสูงตามที่เพลาผสมต้องการ ซึ่งทำให้วัสดุผสมกันได้อย่างมีประสิทธิภาพ
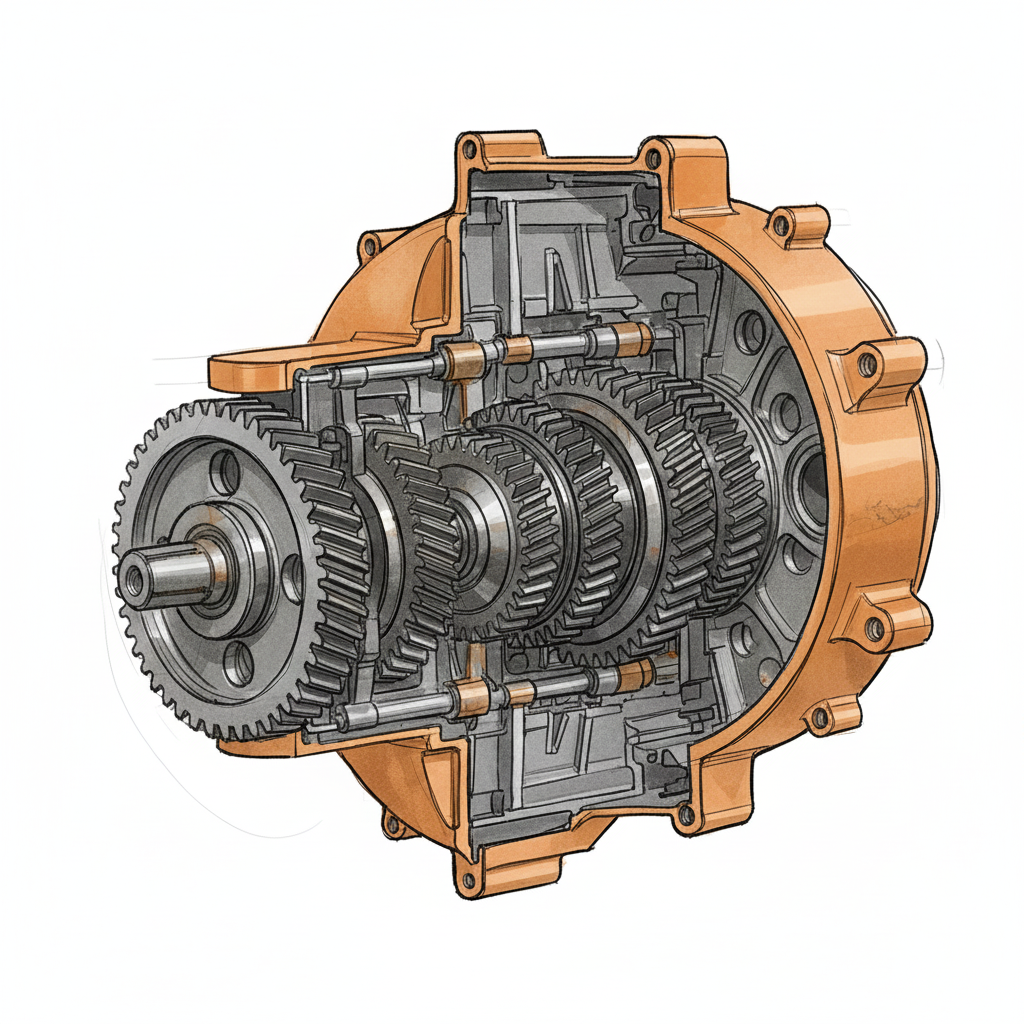
ดีไซน์ - โครงสร้างของกล่องเกียร์ค่อนข้างซับซ้อน ประกอบด้วยคู่เฟืองหลายชุด กลไกคลัตช์ อุปกรณ์เปลี่ยนเกียร์ และเพลาหลายตัว (เพลาขาเข้า เพลาขาออก เพลากลับหลัง เป็นต้น) เพื่อให้สามารถเปลี่ยนอัตราทดเกียร์ได้อย่างยืดหยุ่น
โครงสร้างของเรดิวเซอร์มีความกะทัดรัดและรวมเป็นหน่วยเดียวกันมากกว่า มักจะประกอบด้วยการส่งกำลังด้วยเฟืองแบบขั้นเดียวหรือหลายขั้น เฟืองเพลาขาเข้าและเพลาขาออกของเรดิวเซอร์โดยทั่วไปจะอยู่ในแนวแกนเดียวกัน หรือจัดเรียงในแนวตั้ง/ขนาน และโดยทั่วไปไม่มีฟังก์ชันเปลี่ยนเกียร์
การใช้งาน - กล่องเกียร์: ทำงานในสถานการณ์ที่ต้องการปรับกำลังขาออกแบบแอกทีฟและไดนามิก ทำหน้าที่เป็นส่วนควบคุมของระบบส่งกำลังทั้งหมด กล่องเกียร์ในกังหันลมจะต้องเพิ่มความเร็วการหมุนที่ต่ำมากซึ่งถูกจับได้จากใบพัดให้กลายเป็นความเร็วสูงที่จำเป็นสำหรับเครื่องกำเนิดไฟฟ้า
เรดิวเซอร์: ทำงานเป็นหน่วยประมวลผลตอนปลายภายใต้สายโซ่การส่งกำลัง โดยเรดิวเซอร์จะปรับความเร็วและแรงบิดระหว่างมอเตอร์กับเครื่องจักรที่ใช้งาน
เรดิวเซอร์ชนิด RV ความแม่นยำสูง หรือเรดิวเซอร์แบบฮาร์โมนิก มักจะติดตั้งร่วมกับมอเตอร์เซอร์โวในแขนหุ่นยนต์ เรดิวเซอร์จะแปลงความเร็วสูงและแรงบิดต่ำของมอเตอร์ ให้กลายเป็นความเร็วต่ำ แรงบิดสูง และตำแหน่งที่แม่นยำตามที่แขนหุ่นยนต์ต้องการ
 ข่าวเด่น
ข่าวเด่น2026-06-29
2026-06-24
2026-06-24
2026-06-23
2026-06-18
2026-05-22

ยินดีต้อนรับสู่ Wuma ผู้ผลิตที่มุ่งมั่นพัฒนาและผลิตเครื่องลดความเร็วชนิดต่างๆ และเกียร์มอเตอร์สำหรับงานส่งกำลังด้วยระบบเกียร์
เลขที่ 10 เขตอุตสาหกรรมเซียงชุน เมืองตงหยวน มณฑลชิงเถียน เขตหลีสุ่ย มณฑลเจ้อเจียง ประเทศจีน
ลิขสิทธิ์ © บริษัท เจ้อเจียงอู๋หม่าไดรฟ์ จำกัด สงวนลิขสิทธิ์ทุกประการ นโยบายความเป็นส่วนตัว บล็อก