Pagina Prima > Notitiae&Liber Blog > Scientia Popularis Industriae
Salvete omnes, ego sum Bella a ZHEJIANG WUMA DRIVE CO.,LTD. Hoc anno est tricesimum anniversarium WUMA, et series articulorum divulgata est ut communicemus vobiscum. Hodie formas transmissionis mechanicæ introducemus.
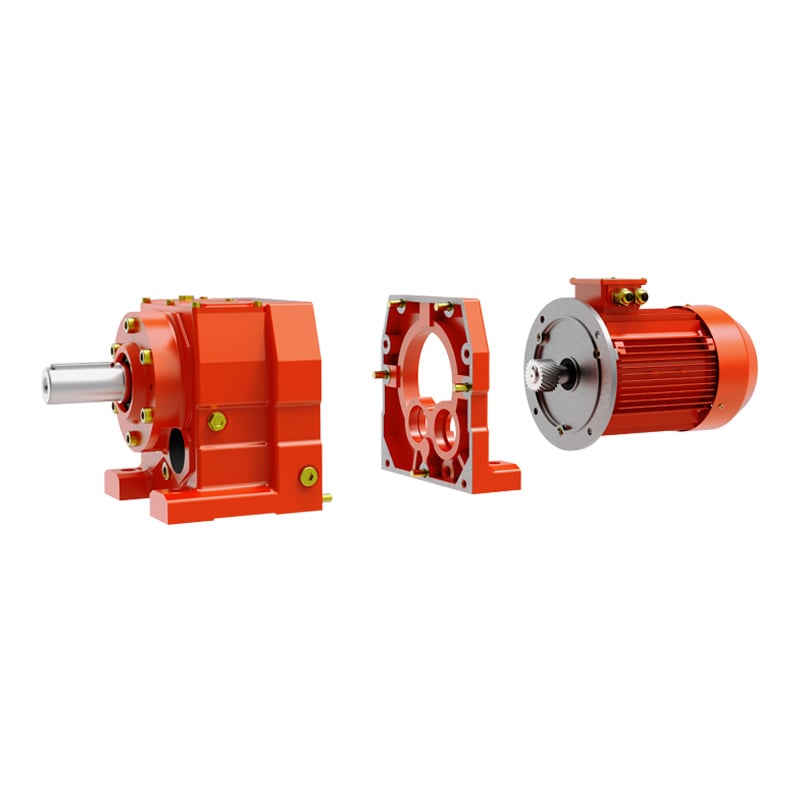
1. Transmissio per Dentes  Transmissio per dentes est forma maxime commode usitata in transmissione mechanica. Praebet altam praecisionem, efficientiam, structuram compactam, operationem fidalem et longam vitam servitii. Transmissiones dentales multis generibus differentibus classificari possunt secundum varias normas.
Transmissio per dentes est forma maxime commode usitata in transmissione mechanica. Praebet altam praecisionem, efficientiam, structuram compactam, operationem fidalem et longam vitam servitii. Transmissiones dentales multis generibus differentibus classificari possunt secundum varias normas.
Praecepta: Structura compacta, idonea ad transmissionem brevis distantiae; lata gamma velocitatum circumferentium et potentiarum applicabilium; transmissio exacta, stabilis et efficiens; alta fiducia et longa vita utilitatis; transmissionem inter axes parallelos, axes in quovis angulo concurrentes, et axes cum angulis arbitrariis efficiet.
Imperfectiones: Fabricationem et praecisionem installationis altiorem requirit; maior pretium; ad transmissionem longissimam inter duos axes non idonea; nulla protectio contra onera excedentia.
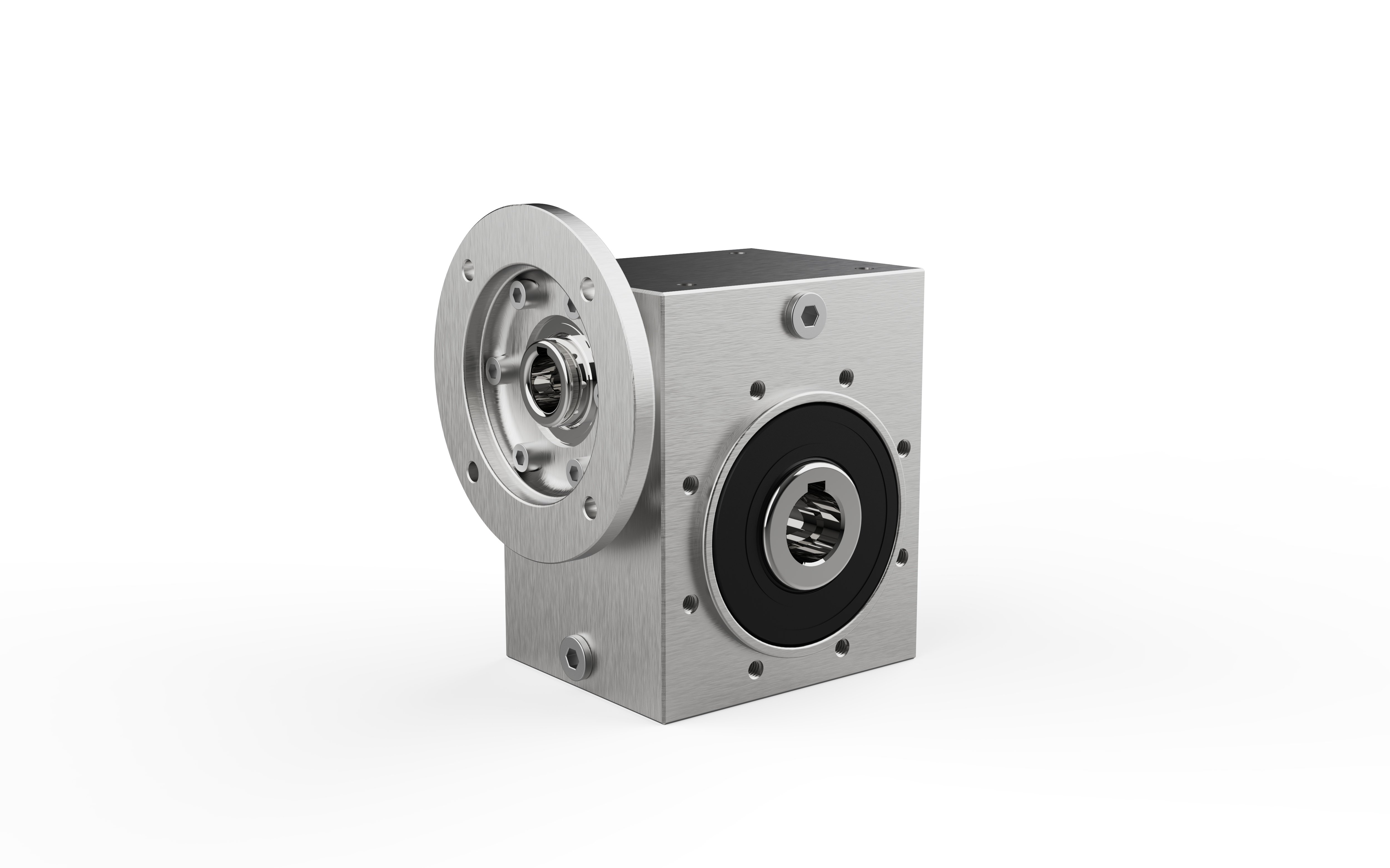
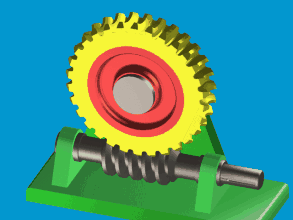
2. Vis Rotulae
Idonea motui et potentiae inter duos axes spatialis perpendicularis sed non intersecting.
Praecepta: Magna ratio transmissionis; structura compacta.
Imperfectiones: Pressio axialis alta, ad generationem caloris pronior, efficacia parva, tantum in unam directionem transmittere potest.
Parametri principales vis rotularum continent: modulum, angulum pressionis, circulum primitivum rotae helicoidalis, circulum primitivum vermis, filettum, numerum dentium rotae helicoidalis, numerum fila vermis, et rationem transmissionis.
3. Cingulorum Transmissiones
Cingulorum transmissiones sunt genus transmissionis mechanicae quae cingulum flexibilem in rodis utitur ad motum vel vim transferendum. Transmissio cingulinis typice constat ex rota motrice, rota mota, et cingulo anulari inter duas rotas tensato.
1) Cum in applicationibus utitur ubi duo axes eadem directione parallela rotant, dicitur motus apertus, conceptibus distantiae centralis et anguli ambactus involutis.
2) Cingula secundum formam transversalem tres principales categorias habent: cingula plana, cingula V-formia, et cingula specialia.
3) Considerationes principales in applicatione includunt: rationem transmissionis calculandam, tensionem cinguli analysandam, et vim permittendam unius cinguli V-formis determinandam.
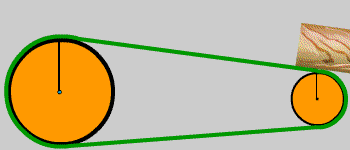
Praecepta: Idonea pro transmissionibus ubi magna distantia inter axes est; cingulum bonam flexibilitatem habet, ictus minuens et vibrationes absorbens; labes impedit damnum aliorum componentium sub onere nimio; structura simplex et pretium humile.
Disadvantages: Maiorum dimensionum generales; necessitat apparatu tensionis; propter lapsus, constans ratio transmissionis non potest praestari; vita cinguli brevior; minor efficacia transmissionis.
4. Catena Motus
Catena motus est modus transmitterendi motum et potentiam rotae motricis speciale dentium forma per catenam ad rotam motam speciale dentium forma. Includit catenas motrices, catenas motas, et catenas anulares. 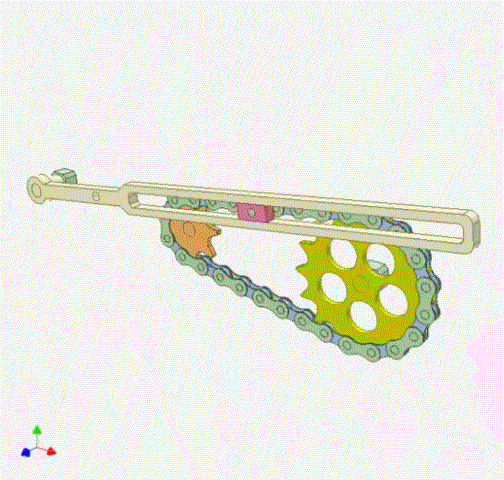
Advantages: Catena motus multa praemia offert. Praeter cinguli motus, eliminat lapsus elasticum et lapsus, praebet exactam mediam rationem transmissionis, est fidus, et valde effica. Transmittit magnam vim, habet fortem capacitatem supra oneris, et minor est magnitudine sub eisdem conditionibus operationis. Exigit minus tensionem et exercet minus pressionem in axem. Potest operare in duris environmentalibus, ut calore, humiditate, pulvere, et pollutione alta.
Risus ad dentatos, catenae minores habent praecisionis in fabricando et constituendo. Structura transmissionis simplicior est cum distantia inter centra magna est. Tamen velocitas catenae instantanea et ratio transmissionis instantanea non constant, quod resultet in parum bonam aequabilitatem transmissionis.
Inconvenientes: Hae tantum uti possunt in transmissionibus inter duo axes parallelos. Sunt onerosae, pronae ad attritionem et elongationem, et habent parum bonam aequabilitatem transmissionis. In operatione, onera dynamica addita, vibrationes, ictus et strepitus generant, ideoque non aptae sunt ad rapidas retroversiones transmissionis.
5. Systema rotae
Transmissio ex duobus aut pluribus rotis composita dicitur systema rotae. Secundum utrum in hoc systemate rotae cum motu axiali adsint necne, rotationes dividuntur in communes et planetarias. Rotae cum motu axiali in systemate rotae vocantur rotae planetariae. 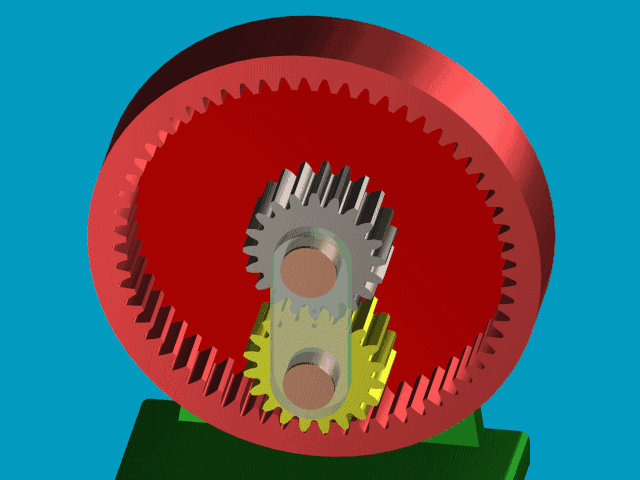
1) Systema rotae dividitur in duo genera: systema rotarum axi fixo et systema rotarum planetarium.
2) Rationem velocitatis angulares (vel celeritatis rotationis) axis intrantis ad axem egredientem in systemate rotae vocant rationem transmissionis. Haec aequat ratiōnī prōducti numerōrum dentium omnium rotorum trahendorum in singulis paribus rotorum mordentium ad productum numerorum dentium omnium rotorum trahentium.
3) In systemate rotarum planetario, rota cuius positio axis mutatur, id est, quae tam rotatur quam revolvitur, dicitur rota planetaria; rota autem cuius positio axis fixa est, dicitur rota centralis vel rota solis.
4) Rationem motus systematis rotae planetarii non potest directe computari per modum solvendi rationem motus systematis rotae axialis fixae. Necesse est ut principium motus relativi uti et methodum velocitatis relativae (vel methodum inversionis) ad transformandum systema rotae planetarii in systema rotae axialis fictivum ad calculandum.
5) Praecipuae characteristicæ systematum rotarum: apta ad motum inter duos axes longius inter se distantis; uti potest ut capsula motus ad motum mutandum; magnam rationem motus consequi potest; motum synchisti et decompositionem motus realizare potest.
Si cupis amplius discere, libere nobis in pagina officiali nostrae contaces!
situs web: www.wumareducer.com
 Nuntiae Calidae
Nuntiae Calidae2026-06-29
2026-06-24
2026-06-24
2026-06-23
2026-06-18
2026-05-22

Salve in Wuma, fabricante quod se obligavit ad res et fabricandas varii typi reductores et motoreductores ad transmissionem rotae dentatae.
No. 10, Ager Industrius Xiangcun, Vicus Dongyuan, Pagus Qingtian, Urbs Lishui, Zhejiang, Sina
Copyright © Zhejiang Wuma Drive Co., Ltd Omnes reservatae Política Privata Blog