Hallo zusammen, ich bin Bella von ZHEJIANG WUMA DRIVE CO., LTD. Dieses Jahr feiert WUMA sein 30-jähriges Bestehen und wir haben eine Artikelserie gestartet, die wir mit Ihnen teilen möchten. Heute stellen wir Ihnen verschiedene Formen der mechanischen Kraftübertragung vor.
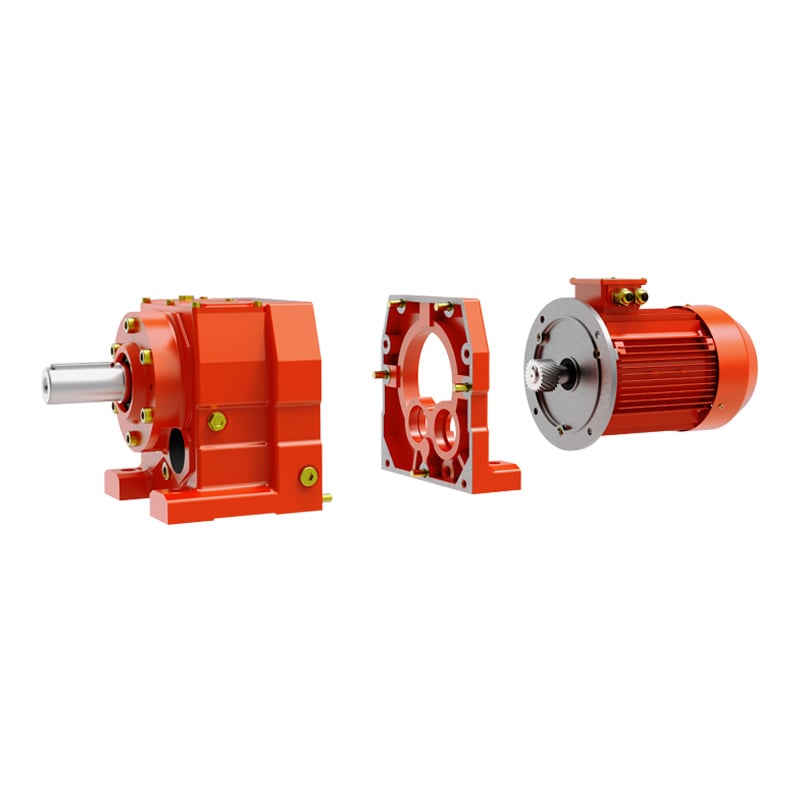
1. Zahnradgetriebe  Zahnradgetriebe ist die am weitesten verbreitete Form der mechanischen Kraftübertragung. Es zeichnet sich durch hohe Genauigkeit, Effizienz, kompakte Bauweise, zuverlässigen Betrieb und lange Lebensdauer aus. Zahnradgetriebe können je nach Norm unterschiedlich klassifiziert werden.
Zahnradgetriebe ist die am weitesten verbreitete Form der mechanischen Kraftübertragung. Es zeichnet sich durch hohe Genauigkeit, Effizienz, kompakte Bauweise, zuverlässigen Betrieb und lange Lebensdauer aus. Zahnradgetriebe können je nach Norm unterschiedlich klassifiziert werden.
Vorteile: Kompakte Bauweise, geeignet für Kurzstreckenübertragung; breiter Bereich an anwendbaren Umfangsgeschwindigkeiten und Leistungen; genaues, stabiles und effizientes Übersetzungsverhältnis; hohe Zuverlässigkeit und lange Lebensdauer; ermöglicht die Übertragung zwischen parallelen Wellen, sich unter beliebigen Winkeln schneidenden Wellen und Wellen mit beliebigen Winkeln.
Nachteile: Hohe Anforderungen an Herstellungs- und Montagegenauigkeit; höhere Kosten; nicht geeignet für Langstreckenübertragung zwischen zwei Wellen; keine Überlastsicherung.
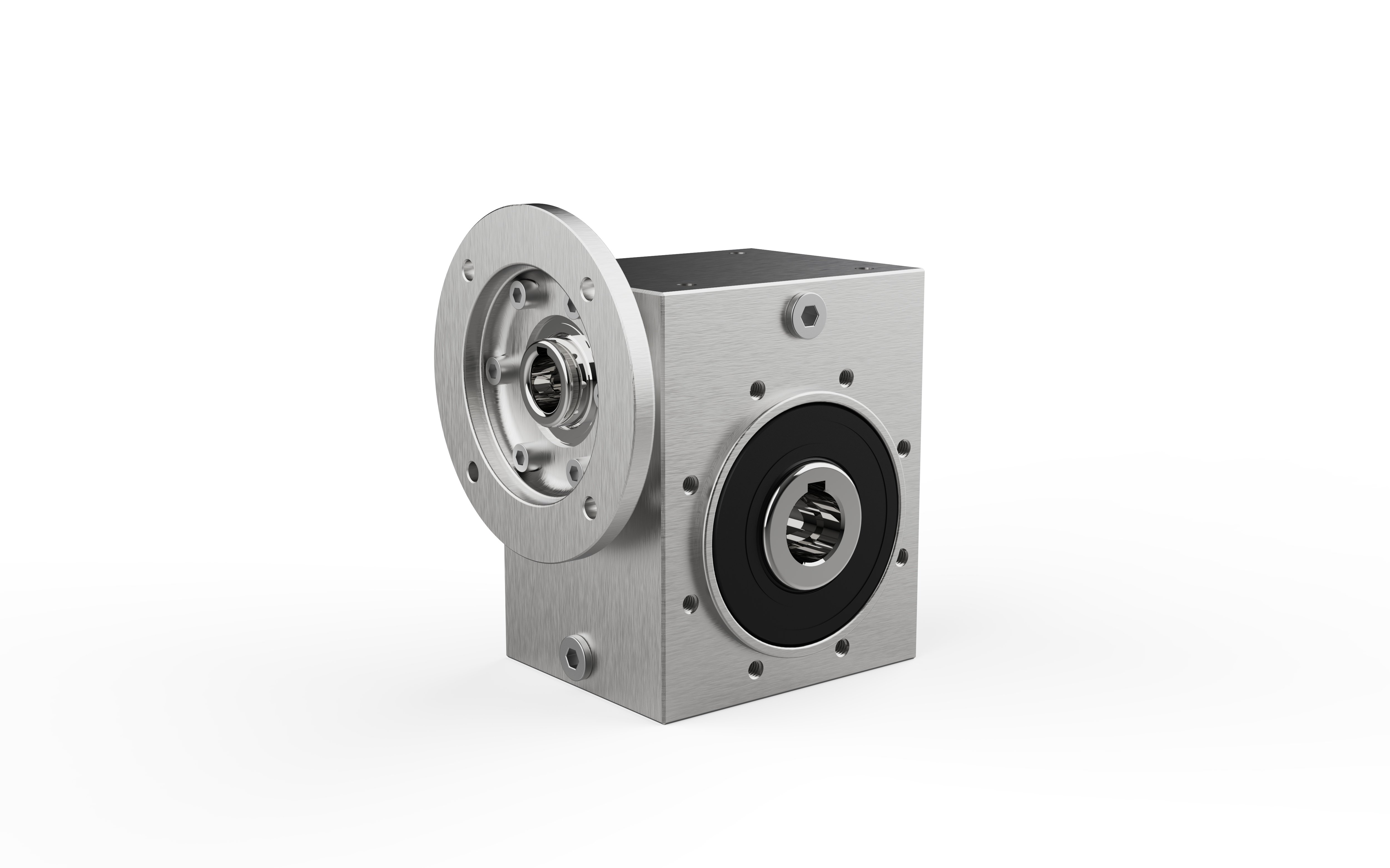
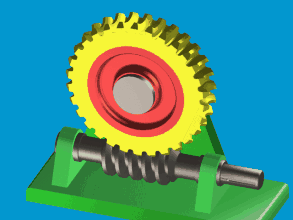
2. Schneckengetriebe
Geeignet für Bewegungs- und Leistungsübertragung zwischen räumlich senkrecht zueinander stehenden, aber nicht schneidenden Wellen.
Vorteile: Großes Übersetzungsverhältnis; kompakte Bauweise.
Nachteile: Hohe Axialkraft, neigt zur Wärmeentwicklung, geringe Effizienz, kann nur in eine Richtung übertragen.
Die Hauptparameter von Schneckengetrieben umfassen: Modul, Druckwinkel, Teilkreis des Schneckenrads, Teilkreis der Schnecke, Steigung, Zähnezahl des Schneckenrads, Anzahl der Schneckengänge und Übersetzungsverhältnis.
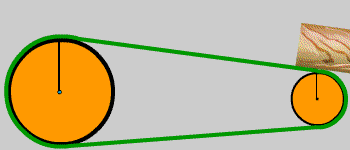
3. Riemenantriebe
Riemenantriebe sind eine Form der mechanischen Kraftübertragung, bei der ein flexibler Riemen über Riemenscheiben gespannt ist, um Bewegung oder Leistung zu übertragen. Ein Riemenantrieb besteht typischerweise aus einer Antriebsscheibe, einer Abtriebsscheibe und einem ringförmigen Riemen, der zwischen den beiden Scheiben gespannt ist.
1) Bei Anwendungen, bei denen zwei Wellen parallel in die gleiche Richtung rotieren, wird dies als offene Schaltung bezeichnet und beinhaltet die Konzepte des Mittenzuges und des Umschlingungswinkels.
2) Riemen können basierend auf ihrer Querschnittsform in drei Hauptkategorien unterteilt werden: Flachriemen, Rundriemen und spezielle Riemen.
3) Wichtige Aspekte bei der Anwendung umfassen: die Berechnung des Übersetzungsverhältnisses, die Analyse der Riemenbeanspruchung und die Ermittlung der zulässigen Leistung eines einzelnen Keilriemens.
Vorteile: Geeignet für Getriebe mit großen Mittenzügen zwischen den Wellen; der Riemen weist gute Flexibilität auf, mildert Stöße ab und absorbiert Vibrationen; Rutschen verhindert Beschädigung anderer Bauteile bei Überlast; einfacher Aufbau und niedrige Kosten.
Nachteile: Größere Gesamtabmessungen; erfordert eine Spannvorrichtung; aufgrund von Schlupf kann kein konstanter Übersetzungsverhältnis garantiert werden; kürzere Riemenlebensdauer; geringere Übertragungseffizienz.
4. Kettenantrieb
Ein Kettenantrieb ist ein Übertragungsverfahren, bei dem Bewegung und Leistung eines Antriebszahnrades mit speziellem Zahnprofil über eine Kette auf ein Abtriebszahnrad mit ebenfalls speziellem Zahnprofil übertragen werden. Er umfasst Antriebsketten, Abtriebsketten und Ringketten. 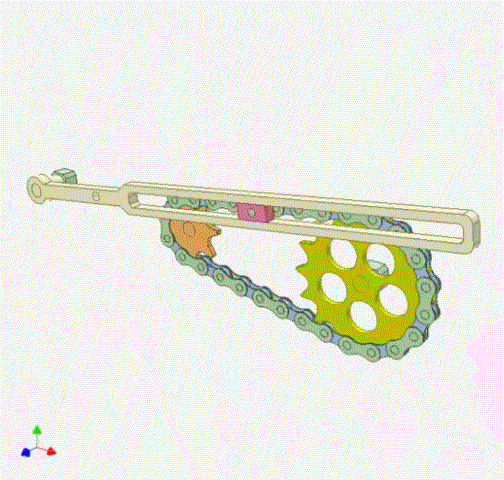
Vorteile: Kettenantriebe bieten zahlreiche Vorteile. Im Vergleich zu Riemenantrieben treten keine elastischen Rutschungen oder Schlupf auf, sie gewährleisten genaue mittlere Übersetzungsverhältnisse, sind zuverlässig und hoch effizient. Sie übertragen hohe Leistungen, weisen eine große Überlastfähigkeit auf und sind bei gleichen Betriebsbedingungen kompakter gebaut. Sie benötigen geringere Vorspannung und belasten die Welle weniger. Sie können in rauen Umgebungen wie hohen Temperaturen, Feuchtigkeit, Staub und Verschmutzung eingesetzt werden.
Im Vergleich zu Zahnradgetrieben haben Kettentriebe geringere Anforderungen an die Herstellungs- und Montagegenauigkeit. Ihre Übertragungsstruktur ist einfacher, wenn der Achsabstand groß ist. Allerdings sind die momentane Kettengeschwindigkeit und das momentane Übersetzungsverhältnis nicht konstant, was zu einer schlechten Laufruhe führt.
Nachteile: Sie können nur für Übertragungen zwischen zwei parallelen Wellen verwendet werden. Sie sind kostspielig, anfällig für Verschleiß und Dehnung und weisen eine schlechte Übertragungsruhe auf. Während des Betriebs entstehen zusätzliche dynamische Belastungen, Vibrationen, Stöße und Geräusche, weshalb sie sich nicht für schnell umschaltende Antriebe eignen.
5. Radsystem
Ein Getriebe, das aus zwei oder mehr Zahnrädern besteht, wird als Radsystem bezeichnet. Abhängig davon, ob im Radsystem Zahnräder mit bewegter Achse vorhanden sind, lassen sich Zahnradgetriebe in gewöhnliche Zahnradgetriebe und Planetengetriebe unterteilen. Zahnräder mit bewegter Achse im Radsystem werden als Planetenräder bezeichnet. 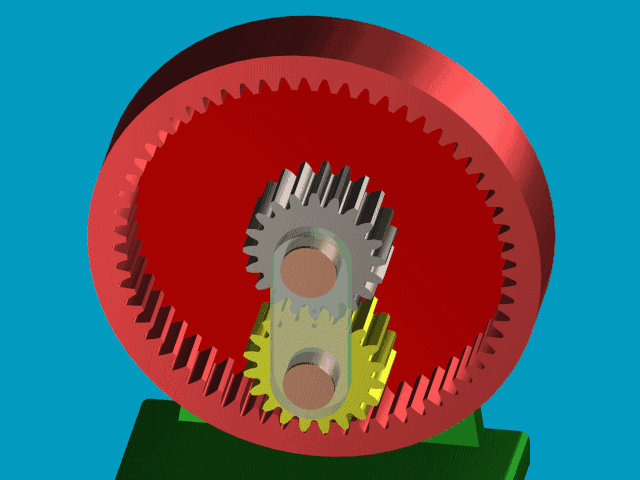
1) Radsysteme werden in zwei Typen unterteilt: Festachs-Radsystem und Planetenradsystem.
2) Das Verhältnis der Winkelgeschwindigkeit (oder Drehzahl) der Eingangswelle zur Ausgangswelle in einem Radsystem wird als Übersetzungsverhältnis bezeichnet. Es entspricht dem Verhältnis aus dem Produkt der Zähnezahl aller getriebener Zahnräder jedes eingekoppelten Rades zum Produkt der Zähnezahl aller treibenden Zahnräder.
3) In einem Planetenradsystem wird das Zahnrad, dessen Achslage sich ändert, das also sowohl eine Dreh- als auch eine Kreiselbewegung ausführt, als Planetenrad bezeichnet, und das Zahnrad, dessen Achslage fest ist, wird als Hohlrad oder Sonnenrad bezeichnet.
4) Das Übersetzungsverhältnis eines Planetenradsystems kann nicht direkt mit der Methode zur Berechnung des Übersetzungsverhältnisses eines festachsigen Radsystems ermittelt werden. Es ist notwendig, das Prinzip der Relativbewegung anzuwenden und die Relativgeschwindigkeitsmethode (oder die Umkehrmethode) zu verwenden, um das Planetenradsystem in ein hypothetisches festachsige Radsystem umzuwandeln, um die Berechnung durchzuführen.
5) Die Hauptmerkmale von Radsystemen: Geeignet für die Kraftübertragung zwischen zwei Wellen, die relativ weit voneinander entfernt sind; können als Getriebe zur Drehzahlverstellung verwendet werden; ermöglichen ein großes Übersetzungsverhältnis; können die Synthese und Zerlegung von Bewegungen realisieren.
Wenn Sie mehr erfahren möchten, zögern Sie bitte nicht, uns über unsere offizielle Website zu kontaktieren!
webseite: www.wumareducer.com
 Aktuelle Nachrichten
Aktuelle Nachrichten2026-06-29
2026-06-24
2026-06-24
2026-06-23
2026-06-18
2026-05-22

Willkommen bei Wuma, einem Hersteller, der sich der Entwicklung und Herstellung verschiedener Arten von Getriebe und Schneckengetriebe für den Bereich der Leistungsübertragung verschrieben hat.
Nr. 10, Xiangcun Industriegebiet, Dongyuan Stadt, Qingtian Kreis, Lishui Stadt, Zhejiang, China
Urheberrecht © Zhejiang Wuma Drive Co., Ltd Alle Rechte vorbehalten Datenschutzrichtlinie Blog